Théorie hélico (classe 6)
Théorie hélico - mécanique du rotor
L'hélicoptère reste une étrange machine conservant pour le commun des mortels, parfois même pour les habitués, un côté magique et mystérieux. Afin de démystifier la complexité inhérente aux voilures tournantes et au vol vertical, nous allons analyser les phénomènes physiques qui régissent le fonctionnement du rotor et identifier les forces en présence.
Pour cela nous allons suivre le déplacement d'une pale au cours de sa rotation, nous en déduirons les fonctions assurées par le rotor, l’architecture requise et les commandes nécessaires au pilotage.
Puis nous nous intéresserons à l'équilibre global de l'appareil, le fonctionnement aérodynamique du rotor et la puissance nécessaire au vol.
Nous terminerons par une description du rotor bipale utilisé sur la plupart de nos hélicos classe 6 et quelques considérations sur la stabilité.
Ici une animation en 3 D d'un rotor quadripales
1 - Portance et traînée de la pale
Pour une incidence donnée, l'élément de pale est soumis à une force aérodynamique que l'on peut décomposer en une force de portance perpendiculaire au vent relatif et une force de traîné parallèle au vent relatif.
La valeur des forces élémentaires de portance et de traîné augmentent de l'emplanture à l'extrémité comme le carré de la vitesse.
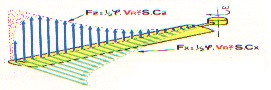
Variation des forces de portance et de traînée
2 - Forces agissant sur une pale en rotation
Une pale est soumise:
- à son poids (P) appliqué au centre de gravité (G)
- à la force centrifuge (Fc) appliquée en G
- à la portance (Fn) appliquée au centre de poussée (CP)
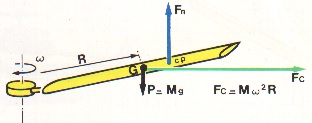
Forces agissant sur la pale
Il existe aussi des forces d'inertie alternées (forces de Coriolis) qui sollicitent la pale dans son plan de rotation.
Le poids de la pale est négligeable par rapport aux autres forces.
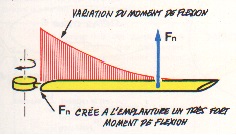 Moment de flexion sans articulation de battement
Moment de flexion sans articulation de battement
La portance (Fn) sollicitant la pale vers le haut crée un moment de flexion dont la valeur est maximale et importante au pied de pale. On comprend que ce moment de flexion induit des contraintes importantes au niveau du point de fixation de la pale et que pour les supporter il faudrait dimensionner de manière prohibitive le pied de pale.
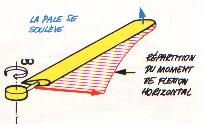
Pour annuler le moment de flexion à l'emplanture donc réduire les contraintes, la pale est articulée dans le plan vertical. L'articulation peut être réelle ou fictive (souplesse).
On voit qu'une telle articulation qui permet à la pale de se déplacer vers le haut (de battre), supprime le moment de flexion en lui substituant un mouvement.
Le battement vertical joue un rôle aérodynamique important.
 Les forces de Coriolis sollicitent la pale en traînée
Les forces de Coriolis sollicitent la pale en traînée
L'articulation de traînée permet à la pale, sollicitée par les forces de Corriolis, d'osciller horizontalement autour d'une position moyenne. Ce degré de liberté annule le moment de flexion au niveau du pied de pale.
En résumé :
L’articulation de pas permet de faire varier l’incidence de la pale par rotation autour de son axe longitudinal (ou axe de variation de pas) . Cette variation est commandée par le pilote.
L'articulation de battement:
- supprime les contraintes de flexion verticale au niveau du pied de pale,
- compense la dissymétrie de portance entre pale avançante et pale reculante, en vol de translation.
Mais le battement des pales crée des contraintes de flexion horizontales en pied de pale (voir articulation de traînée).
L’articulation de traînée supprime les contraintes horizontales provoquées par le battement.
La nécessité de ces articulations a été mise en évidence par Juan de la Cierva lors de la mise au point d’un autogire. Cette conception articulée du rotor a permis l’essor de l’hélicoptère.
3 - Contrôle de la portance du rotor
2 facteurs font varier la portance afin de piloter:
- la vitesse circonférentielle de la pale, soit la vitesse de rotation du rotor,
- l’incidence de la pale.
Les autres facteurs dépendent soit de la pression atmosphérique et de la température, soit de la surface et du profil de la pale.
Les rotors d’hélicoptère tournent à vitesse constante (régulation de vitesse), c’est donc la variation d’incidence des pales qui permet de contrôler la portance.
La variation collective du pas :
Le plateau cyclique est l'élément essentiel de la variation cyclique du pas. En fait c'est un plateau de commande qui non contant de coulisser le long du mat rotor (sous l'action du levier de pas collectif) peut osciller dans tous les sens autour d'une rotule. Ce sont les oscillations du plateau cyclique qui, commandées par le pilote (manche cyclique) sont à la base de la variation cyclique de pas.
Commandé à partir du levier de pas collectif, le plateau cyclique se déplace parallèlement à lui même. Il n'y a pas de variation cyclique du pas; le plateau de commande reste perpendiculaire au mât rotor.
Commandé à partir du manche cyclique le plateau cyclique peut osciller autour de son centre. Le plan de commande n'est plus perpendiculaire au mât rotor: il y a variation cyclique du pas.
Dans le cas général il y a combinaison de mouvement: la variation collective du pas se superpose à la variation cyclique.
Avant d'étudier les effets de la variation cyclique du pas, résumons-en le mécanisme:
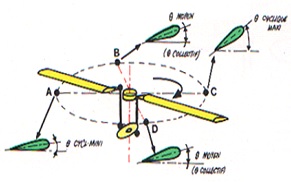 Variation cyclique du pas
Variation cyclique du pas
- En A le pas est minimal,
- En C le pas est maximal,
- De A à C le pas croît progressivement,
- De Cà A le pas décroît progressivement,
- En B et D la variation cyclique n'est pas ressentie, on retrouve le pas collectif d'origine.
Les effets de la variation cyclique du pas:
Nous avons vu, lors de l'étude de la dissymétrie latérale de la portance, l'effet de la variation cyclique d'incidence provoquée par la variation de vitesse du vent relatif. Ici c'est la même chose, à ceci près que la variation d'incidence est provoquée par une variation cyclique du pas et non par une variation de vitesse et qu'elle peut s'exercer dans tous les sens suivant l'inclinaison commandée du plateau cyclique.
Variations cycliques longitudinale et latérale :
Pour lui permettre de prendre toutes les inclinaisons possibles, le plateau cyclique peut basculer autour de 2 axes perpendiculaires. Tout déplacement du manche cyclique provoque l'inclinaison du plateau cyclique donc du plan de rotation du rotor.
Manche cyclique en avant ou en arrière, le plateau cyclique bascule autour de l'axe transversal provoquant une variation cyclique du pas en latéral. Si le manche est en avant, le pas maxi est atteint en B et la levée maxi de la pale se produit en C: le plan de rotation s'incline vers l'avant. Si le manche est en arrière, le pas maxi est atteint en D et la levée maxi de la pale se produit en A: le plan de rotation s'incline vers l'arrière.
Manche cyclique à droite ou à gauche, le plateau cyclique bascule autour de l'axe longitudinal provoquant une variation cyclique du pas en longitudinal.
4 - Le couple de réaction du rotor principal
Toute force pour se manifester prend appui sur un support. Si le support est libre de bouger, il se déplace en sens contraire de la force qui s'appuie sur lui. Il en va de même pour un rotor d'hélicoptère. Pour tourner, le mât rotor auquel est appliqué le couple moteur prend appui sur la structure de l'hélicoptère qui est entraînée en sens contraire du rotor par un couple de réaction égal et opposé au couple moteur. Le rotor arrière empêche l'hélicoptère de tourner sur lui même sous l'action du couple de réaction du rotor principal.
Les effets de la poussée du rotor arrière :
L'angle de pas des pales du rotor arrière est choisi de manière que la poussée du rotor qui s'exerce à l'extrémité du fuselage, soit opposée au couple de réaction du rotor principal. Un compromis doit être recherché entre la valeur de la poussée du rotor arrière (qui consomme de la puissance), et la longueur de la poutre de queue (bras de levier de la poussée).
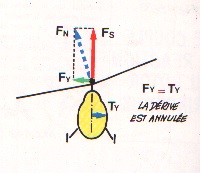 Equilibre des forces en lacet
Equilibre des forces en lacet
La poussée du rotor arrière équilibre le couple du rotor principale et génère une force latérale, appliquée au centre de gravité, qui fait dériver l'hélicoptère. Pour annuler cette dérive il faut appliquer une force égale en sens contraire. Ce résultat est atteint par inclinaison du disque rotor principal dans le sens opposé à la poussée rotor arrière.
Mais on n'élimine pas aussi facilement les séquelles de la poussée du rotor arrière. L'inclinaison du rotor principal compense bien le mouvement de dérive mais le point d'application des forces crée un couple qui tend à incliner l'hélicoptère. Pour diminuer ce couple on joue sur la longueur du bras de levier, notamment en surélevant l'axe de rotation du rotor arrière.
Variation du couple de réaction du rotor principal:
Le couple de réaction du rotor principal est égal et opposé au couple moteur qui équilibre la traînée des pales. L'effort de traîné augmente avec l'incidence donc le pas collectif qui varie dans le même sens que le couple moteur.
Variation de la poussée du rotor arrière:
Pour maintenir l'hélicoptère en équilibre autour de son axe de lacet le pilote doit doser la valeur de la poussée du rotor arrière en fonction de la valeur du couple moteur, c'est à dire du pas collectif des pales principales.
Un mécanisme simple permet de libérer le pilote de cette servitude: c'est le couplage pas collectif /pas rotor arrière.Le rotor arrière destiné à compenser le couple de réaction du rotor principal, permet du même coup, de contrôler l'appareil sur son axe de lacet.D’autres architectures permettent de s’affranchir du rotor arrière : rotor principaux contrarotatifs parallèles ou engrenant, rotors principaux en tandem. Ces formules sont moins répandues car elles introduisent d’autres éléments de complexité.
5 - Le fonctionnement aérodynamique du rotor
 Variation de la vitesse d’écoulement de l’air à travers le rotor
Variation de la vitesse d’écoulement de l’air à travers le rotor
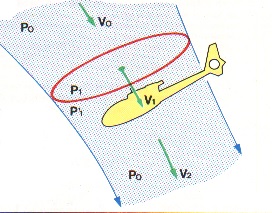
Ecoulement de l'air au travers du rotor :
Le rotor en tournant aspire l'air à sa partie supérieure et le refoule vers le bas. Il accélère donc la masse d'air soumise à son influence. La pression et la vitesse varient tout au long de la veine d'air en mouvement:
- à l'infini amont la pression de l'air est Po (c'est la pression atmosphérique). La vitesse relative de l'air est Vo. Elle est égale et opposée à la vitesse de déplacement de l'hélicoptère.
- au niveau du disque rotor, la vitesse de l'air V1 a augmenté. Sur la face supérieure du disque la pression est P1 (P1<Po): zone de dépression. Sous la face inférieure la pression est P'1 (P'1>Po): zone de pression.
- A l'infini aval la vitesse de l'air V2 a encore augmenté. La pression de l'air est Po (pression atmosphérique).
De manière théorique le rotor peut être considéré comme un disque créant entre ses deux faces une différence de pression. Il en résulte une force normale (poussée du rotor) et une accélération de l’air. La vitesse Vo à l’infini amont prend la valeur V1 à la traversée du disque et devient égal à V2 à l’infini aval.
L'état de vortex :
Il se rencontre lors d'une descente lente: la vitesse verticale des filets d'air à l'infini aval est inférieure à la vitesse induite par le rotor, une inversion de vitesse du flux d'air se produit sous le rotor. Les pales tournent dans leur propre remous et l'air forme un anneau tourbillonnaire isolant le rotor qui n'est plus traversé par le flux d'air. Cette configuration "état de vortex" est dangereuse car le rotor, en zone de décrochage, n'est plus contrôlable. Pour en sortir il faut partir en translation ou réduire le pas pour une mise en autorotation.
L'effet de sol :
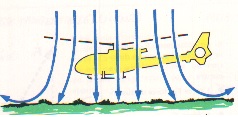
Ecoulement d’air près du sol
Lorsque l'hélicoptère est en stationnaire, à proximité immédiate du sol, l'énergie cinétique communiquée à l'air par le rotor, s'annule au contact du sol et se transforme en énergie de pression, sauf dans la zone périphérique ou les filets d'air sont déviés. L'augmentation de pression se fait sentir sur l'intrados des pales entraînant une augmentation de portance du rotor. On dit que l'appareil se trouve dans l'effet de sol.
L'autorotation :
En cas de panne moteur, l'hélicoptère ne tombe pas. Son rotor, entraîné par le vent relatif, reste le siège d'une portance qui bien qu'inférieure au poids de l'appareil est suffisante pour freiner la descente et conserver le contrôle jusqu'à l'atterrissage.
La limitation de vitesse du rotor :
Vitesse de rotation du rotor et vitesse de translation de l'hélicoptère ne doivent pas dépasser certaines limites à partir desquelles se développent sur les pales des perturbations d'ordre aérodynamique entraînant: décrochage, vibration et contraintes mécaniques élevées.
En vol de translation, sur la pale reculante la vitesse de translation se retranche de la vitesse de la pale. La vitesse relative résultante diminue et la zone d'emplanture de la pale peut "tourner le dos" au vent relatif. Le flux d'air est inversé et attaque la pale coté bord de fuite. L'inversion du flux d'air provoque des turbulences et crée une portance négative.
6 - Le vol de l'hélicoptère
En vol l'hélicoptère est soumis à 3 forces :
- son poids appliqué au centre de gravité;
- la traînée générale de l'appareil provoquée en vol de translation, par la résistance de l'air sur la structure, appliquée au centre de gravité (en fait au centre aérodynamique);
- la portance appliquée au centre du rotor et perpendiculaire au plan de rotation.
Pour que l'hélicoptère soit en équilibre il faut que la résultante du poids et de la traînée soit égale et opposée à la portance. La résultante générale des forces appliquées est alors nulle. Les conditions d'équilibre correspondent au vol stabilisé.
Equilibre des forces en vol
Variation des forces en présence:
L'intensité de la portance est fonction du pas collectif, sa direction du pas cyclique.
La variation du pas cyclique modifie l'inclinaison de la portance. Pour un pas collectif donné, la portance diminue lorsque l'altitude ou la température augmentent.
Le vol stationnaire exige:
- l'égalité de la portance et du poids obtenue par action sur le levier de pas pour une altitude et un poids donnés
- la compensation des forces parasites (dues au centrage , au vent...) obtenu par action sur le manche cyclique. Et là réside l'art du pilotage en stationnaire qui demande au pilote de devancer ces forces parasites (notamment le vent) par une action quasi continue sur le manche cyclique.
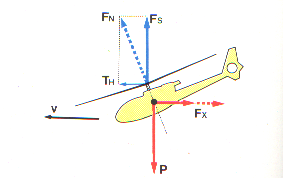
Le vol de translation:
Le déplacement du manche cyclique vers l'avant provoque une variation cyclique longitudinale du pas qui entraîne l'inclinaison du plan de rotation vers l'avant. La portance admet alors 2 composantes:
- Fs qui assure la sustentation et équilibre le poids P
- Th qui assure la translation et équilibre la traînée Fx
L'assiette de l'appareil suit l'inclinaison du plan de rotation.
Pour un pas collectif et un pas cyclique donné, la vitesse de translation va croître jusqu'à ce que la traînée équilibre la composante de translation. La vitesse de translation reste alors constante.
Pour une valeur donnée du pas collectif, la portance croit avec la vitesse de translation. En conséquence le pas collectif nécessaire au vol de translation est inférieur au pas collectif nécessaire au vol stationnaire.
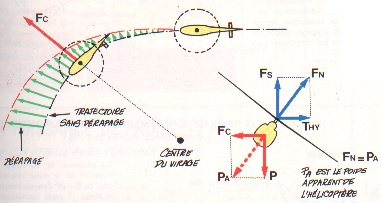
L'équilibre en virage:
En virage apparaît une nouvelle force, la force centrifuge qui si elle n'était pas équilibrée provoquerait le dérapage de l'hélicoptère. Pour l'équilibrer c'est encore à l'inclinaison du plan rotor que l'on fait appel. La composante qui résulte de cette inclinaison latérale vers l'intérieur du virage, équilibre la force centrifuge. Le pilote doit d'autant plus incliner le plan de rotation que la vitesse de translation est grande et que le rayon du virage est petit. Un supplément de puissance est nécessaire pour conserver une altitude constante (augmentation du pas collectif) car le poids apparent de l’hélicoptère augmente.
 Equilibre des forces en virage
Equilibre des forces en virage
Puissance nécessaire au vol :
Rotor principal et rotor arrière sont entraînés, à partir d'un moteur qui fournit la puissance nécessaire au vol, par un ensemble de transmission mécanique comprenant des arbres et des boîtes de transmission qui jouent le rôle de réducteur et de renvoi d'angle.
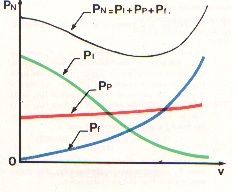
La puissance nécessaire est la somme de:
- la puissance induite (communiquée à l'air par la rotation du rotor),
- la puissance de profil (qui combat la traînée des pales),
- la puissance de fuselage (qui combat la traînée générale de l'appareil).
 Courbes de puissance
Courbes de puissance
Variation de la puissance nécessaire en fonction de la vitesse de translation:
Si pour chaque valeur de la vitesse de translation ont fait la somme des valeurs des 3 puissances élémentaires on obtient la courbe de variation de la puissance nécessaire en fonction de la vitesse pour une altitude et une masse donnée. Vous remarquerez qu'elle diminue lorsque la vitesse croit, passe par un minimum, puis croît ensuite très vite.
Lorsque nous décrivons un circuit, la puissance nécessaire augmente sur le trajet vent arrière. Vent de face, la vitesse du vent s’additionne à la vitesse de translation, vent arrière elle se soustrait, nous sommes donc obligés, pour maintenir une altitude constante, d’augmenter la portance avec le pas collectif.
Plafond en vol stationnaire:
C'est la faute à la masse volumique de l'air qui diminue régulièrement quand l'altitude augmente:
- d'une part le moteur manque de plus en plus d'air et la puissance développée diminue
- d'autre part l'air devient de moins en moins porteur et il faut consommer de plus en plus d'énergie pour conserver la même sustentation. Il en résulte une augmentation de la puissance induite donc de la puissance nécessaire.
7- Le rotor bipale Bell-Hiller
La conception des rotors bipale de modèle réduit est basée sur une idée présentée par Arthur Young à la société Bell en 1941 puis améliorée par Stanley Hiller.
Young a conçu un rotor qui permet de s'affranchir des articulations de battement et de traîné: une barre stabilisatrice liée aux 2 pales, montées en balancier, est orientée perpendiculairement à leur axe. Ce stabilisateur absorbe les rafales en aidant les pales à revenir dans leur plan de rotation d'origine après une perturbation. Il transfert sa stabilité gyroscopique au rotor. Ce concept a été mis au point par Arthur Young avec une maquette modèle réduit électrique et commandé à distance. La société Bell l’a retenu sur ses premiers appareils série.
Le rotor des modèles réduits reprend la solution développée par Stanley Hiller: Deux palettes, commandées en incidence par le plateau cyclique, sont ajoutées à l'extrémité de la barre Bell. En inclinant le plateau cyclique on augmente leur pas, par effet aérodynamique l’une monte l’autre descend et elles font varier l'incidence des pales par l'intermédiaire de biellettes, (mise en incidence d'une pale et diminution sur l'autre). Elles stabilisent l'hélicoptère et démultiplient les efforts de commandes en roulis et tangage.
Ces palettes constituent un premier gyroscope, elles s’inclinent ¼ de tour après l’action aérodynamique et il en est de même des pales principales qui subissent aussi un retard d’ ¼ de tour. Le mouvement semble inversé par rapport à l’ordre initial, en raison de ces 2 quarts de tour qui s’ajoutent.
Ce système appelé barre Bell -Hiller simplifie les commandes, réduit la masse et les efforts de commandes.
Il a permis la mise au point des premiers modèles radiocommandés qui nécessitaient une stabilisation efficace (vitesse de rotation rotor élevée) et une démultiplication des efforts de commande compatible avec la puissance des servocommandes.
Nous avons vu précédemment que sous l’influence de la vitesse, la pale qui avance porte plus (vitesse apparente plus élevée) que celle qui recule. Il en résulte un effet de basculement du rotor qui s’amplifie avec la vitesse. D’où l’articulation de battement pour que la pale qui avance puisse se relever (et en même temps elle diminue de pas) ce qui permet au rotor de s’incliner sans que le fuselage bascule. Ces articulations de battement (et de traînée) sont assurées sur les modèles réduits par des liaisons légèrement souples (joint caoutchouc) donnant une certaine liberté aux pales tout en restant de réalisation simple. On ne conserve que l’articulation de pas.
Ce rotor présente des avantages car il assure une grande stabilité, mais en contrepartie il réduit la maniabilité. Le modèle est mou aux commandes et répond avec retard. Un compromis maniabilité stabilité est obtenu en faisant varier la masse (ou la surface) des palettes.
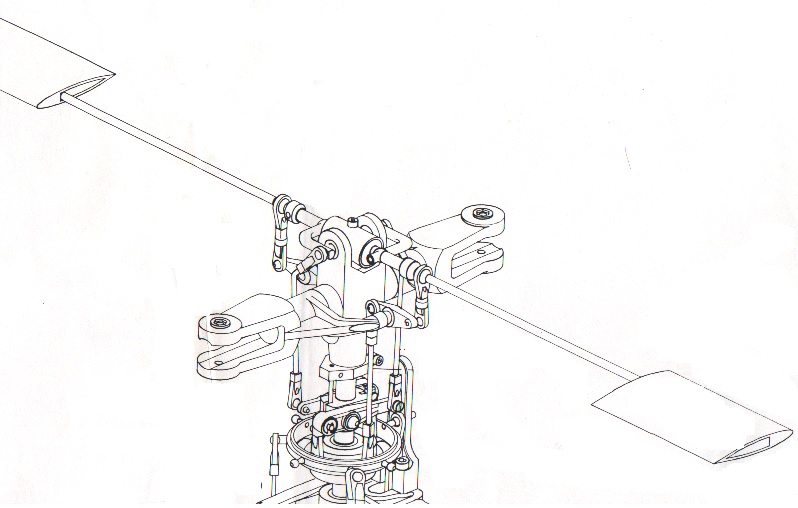 Tête rotor maquette stabilisée par une barre Bell-Hiller : le plateau cyclique pilote les palettes Hiller liées aux pales.
Tête rotor maquette stabilisée par une barre Bell-Hiller : le plateau cyclique pilote les palettes Hiller liées aux pales.
8 - Maniabilité / stabilité
Nous savons comment réaliser un hélicoptère, comment combattre le couple, comment le faire monter ou descendre, comment agir sur lui pour le diriger, mais sera-t-il stable ?
Essayons d’y voir clair, au point de vue de la définition un mobile est stable quand il tend à revenir à sa position d’équilibre, mais c’est très insuffisant : par exemple un pendule revient à sa position d’équilibre après une série d’oscillations, ce qui serait inacceptable pour un hélicoptère. Il faut distinguer ce qui est la tendance initiale à revenir (stabilité statique) et ce qui se passe quand le pendule ou le mobile est lâché : la vitesse de retour vers le neutre et la tendance à le dépasser, le freinage ou l’amortissement (stabilité dynamique)
De plus l’hélicoptère doit être pilotable, maniable même, et c’est une qualité qui s’oppose en général à la stabilité. Il y aura donc un compromis à obtenir. On cherche à obtenir un appareil au vol stable et que l’on pourra orienter dans la direction voulue. Pour cela il faut introduire la notion de temps de réponse plutôt que de stabilité, car il nous faut un modèle dont le temps de réponse soit grand par rapport à notre temps de réaction.
Si on pose verticalement sur le doigt, en équilibre, une allumette ou une perche de 5m, elles seront toutes les deux instables. On arrivera (avec de l’entraînement) à garder la perche en équilibre, mais pas l’allumette qui tombera de côté avant qu’on ait pu réagir.
La perche de 5m a un temps de réponse plus long que le temps de réaction du pilote qui aura le temps de la voir s’incliner et réagira du bon côté avant qu’elle ne tombe, ce qu’il ne peut pas faire avec une allumette. On peut donc piloter quelque chose d’instable à condition qu’il diverge lentement.
Pour résumer, il faut un modèle dont le temps de réponse (que ce soit une tendance à revenir au neutre ou une divergence) soit suffisamment long pour que l’on puisse réagir en temps utile.
Tentons d’appliquer ce critère à un hélicoptère. Le premier point important est la stabilité pendulaire. Obtenue en plaçant le centre de gravité très bas sous le rotor, elle est au contraire néfaste, celui-ci doit être le plus haut possible (les jouets formés d’un disque rotor seul ont une excellente stabilité)
La stabilité du rotor est obtenue grâce à la barre Bell-Hiller décrite précédemment. Elle augmente fortement l’inertie apparente du rotor par rapport à l’axe perpendiculaire aux pales. Les variations de pas des pales seront plus lentes, donc les divergences éventuelles et son temps de réponse va être augmenté. Cela n’introduit aucune référence de verticale et le rotor est stabilisé parallèlement à lui-même, sans tendre à revenir à l’horizontale : il appartiendra au pilote de le faire.
Ce qui précède concerne un hélicoptère en vol stationnaire. En vol de translation les filets d’air traversent le rotor en diagonale et il apparaît des effets aérodynamiques importants :
- Par effet de girouette l’hélicoptère va acquérir une stabilité en direction, la puissance consommée par l’anticouple diminue, le pilotage est facilité et commence à ressembler à celui d’un avion.
- De façon générale, la stabilité est très augmentée, ce n’est plus une bille en équilibre sur un ballon.
- La puissance nécessaire au vol diminue (elle remonte ensuite à grande vitesse), de sorte qu’en partant du stationnaire pour accélérer, l’hélicoptère va monter, ce qui est favorable. L’inverse est hélas plus gênant, car lorsque l’on va décélérer pour s’immobiliser avant de se poser, il va falloir remettre du pas.
J’espère vous avoir donné l’envie d’approfondir ce sujet difficile mais passionnant et peut être de passer de la théorie à la pratique.
Vous pourrez trouver des compléments intéressants sur de nombreux autres problèmes posés par l’hélicoptère dans le livre "Théorie élémentaire de l'hélicoptère" de R. Raletz, édité par Aérospatiale en 1979, et qui a servi de base pour rédiger cet article.
★ Manuels de référence pour la classe 6
 L'Hélicoptère ULM Classe 6 -
L'Hélicoptère ULM Classe 6 -
★ Docs PDF
- Le théorique du PPL (Avion - Hélico)
- Rotorcraft Flying Handbook FAA (198 pages - 84Mio)